


ROBOT KIRIGAMI SIÊU NHỎ
08:57 - 19/09/2024
Sản phẩm mới nhất của ngành robot vi mô tại Đại học Cornell là một con robot có kích thước nhỏ hơn 1 mm được in dưới dạng “metasheet” lục giác 2D nhưng khi có dòng điện, nó có thể biến đổi thành các hình dạng 3D được lập trình sẵn và di chuyển.
SIÊU VẬT LIỆU CÓ TIỀM NĂNG ỨNG DỤNG TRONG CÔNG NGHỆ CẢM BIẾN
Chủ tịch Phan Xuân Dũng chúc mừng Tổng hội Y học, Hội Dược học nhân ngày Thầy thuốc Việt Nam
CHIP MICROCOMB MỞ ĐƯỜNG CHO HỆ THỐNG GPS CHÍNH XÁC HƠN GẤP NGHÌN LẦN
SỬ DỤNG SÓNG TERAHERTZ CHO MẠNG 6G AN TOÀN VÀ ỔN ĐỊNH
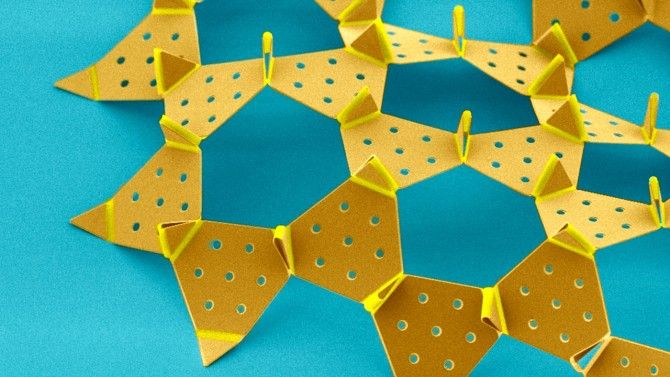
Tính linh hoạt của robot này là nhờ thiết kế mới lạ dựa trên kirigami, một nghệ thuật tương tự origami trong đó các lát cắt trên vật liệu (từ tiếng Nhật “kiru” có nghĩa là “cắt”) cho phép robot có thể gấp lại, mở rộng và di chuyển.
Theo một nghĩa nào đó, nguồn gốc của robot kirigami được lấy cảm hứng từ “các sinh vật sống có thể thay đổi hình dạng”. Robot bình thường có thể di chuyển một số chi nhưng hình dạng tổng thể của nó thường là tĩnh. Trong nghiên cứu này, các nhà khoa học đã chế tạo một con robot metasheet. “Meta” là viết tắt của siêu vật liệu, nghĩa là chúng bao gồm rất nhiều khối xây dựng hoạt động cùng nhau để tạo ra các hành vi cơ học cho vật liệu. Những siêu vật liệu như vậy thường được thiết kế để có những đặc tính khó đạt được ở các vật liệu tự nhiên.
Nghiên cứu có tựa đề “Electronically Configurable Microscopic Metasheet Robots” được xuất bản vào ngày 11 tháng 9 trên tạp chí Nature Materials. Trong nghiên cứu này, robot là một khối lục giác được tạo thành từ khoảng 100 tấm silicon dioxide được kết nối thông qua hơn 200 bản lề kích hoạt, mỗi bản lề mỏng khoảng 10 nm. Khi được kích hoạt bằng điện hóa thông qua các dây bên ngoài, các bản lề tạo thành những nếp gấp dạng gờ và rãnh, chúng hoạt động để mở rộng và xoay các tấm, cho phép robot thay đổi hình dạng, mở rộng và co lại cục bộ lên đến 40%. Tùy thuộc vào bản lề nào được kích hoạt, robot có thể có nhiều hình dạng khác nhau và có khả năng quấn quanh các vật thể khác, sau đó mở ra trở lại thành một tấm phẳng. Đó chính là sự linh hoạt của kirigami.
Việc tạo ra thiết bị này ở cấp độ vi mô là một quá trình dài và phức tạp, từ việc tìm ra cách luồn dây điện qua các bản lề khác nhau cho đến việc xác định sự cân bằng lý tưởng giữa độ mềm dẻo và độ cứng để robot có thể tạo ra và giữ nguyên hình dạng của nó. Một trong những thách thức quan trọng nhất là phải nghĩ ra cách để một thứ có nhiều bộ phận chuyển động như vậy có thể tự di chuyển.
Một tấm kirigami có hàng trăm điểm tiếp xúc tiềm năng với mặt đất. Vì vậy, trong thời gian dài, nhóm nghiên cứu đã bối rối về những bộ phận nào của robot tiếp xúc với mặt đất để khiến robot di chuyển. Cuối cùng, nhóm nhận ra rằng nếu thay vì sử dụng ma sát, họ có thể khiến robot chuyển động “bơi” trong môi trường bằng cách thay đổi hình dạng của nó, các lực trở nên nhất quán hơn nhiều. Tất nhiên, bơi ở quy mô vi mô rất khác so với bơi trong hồ bơi. Ở quy mô đó, nó giống như bơi qua một thùng mật ong hơn. Chi tiết tham khảo tại:
Qingkun Liu, Wei Wang, Himani Sinhmar, Itay Griniasty, Jason Z. Kim, Jacob T. Pelster, Paragkumar Chaudhari, Michael F. Reynolds, Michael C. Cao, David A. Muller, Alyssa B. Apsel, Nicholas L. Abbott, Hadas Kress-Gazit, Paul L. McEuen, Itai Cohen. Electronically configurable microscopic metasheet robots. Nature Materials, 2024; DOI: 10.1038/s41563-024-02007-7