


Con người trong thuật toán tìm đường của robot
08:20 - 28/06/2022
Cũng giống như chúng ta, robot không thể nhìn xuyên tường, đôi khi chúng cần một chút trợ giúp để đi đến nơi cần đến.
SIÊU VẬT LIỆU CÓ TIỀM NĂNG ỨNG DỤNG TRONG CÔNG NGHỆ CẢM BIẾN
CHIP MICROCOMB MỞ ĐƯỜNG CHO HỆ THỐNG GPS CHÍNH XÁC HƠN GẤP NGHÌN LẦN
SỬ DỤNG SÓNG TERAHERTZ CHO MẠNG 6G AN TOÀN VÀ ỔN ĐỊNH
MÔ HÌNH DEEPSEEK R1 MỚI RA MẮT GÂY CHẤN ĐỘNG THỊ TRƯỜNG AI
Các kỹ sư tại Đại học Rice đã phát triển một phương pháp cho phép con người giúp robot “nhìn thấy” môi trường của chúng và thực hiện nhiệm vụ. Phương pháp mang tên Bayesian Learning IN the Dark - viết tắt là BLIND - là một giải pháp mới cho vấn đề lâu dài về lập kế hoạch chuyển động cho các robot hoạt động trong môi trường mà không phải lúc nào mọi thứ cũng có thể nhìn thấy rõ ràng.
Theo nghiên cứu, thuật toán được phát triển nhằm đưa vào vai trò của con người trong vòng lặp để “tăng cường nhận thức của robot và quan trọng là ngăn chặn việc thực hiện chuyển động không an toàn”.
Để làm như vậy, Các nhà nghiên cứu đã kết hợp học tăng cường nghịch đảo Bayes (theo đó một hệ thống học hỏi từ thông tin và kinh nghiệm được cập nhật liên tục) với các kỹ thuật lập kế hoạch chuyển động đã được thiết lập để hỗ trợ robot có “mức độ tự do cao” - tức là có rất nhiều bộ phận chuyển động.
Để kiểm tra BLIND, phòng thí nghiệm Rice đã chỉ đạo một robot Fetch, là một cánh tay có khớp nối với bảy khớp, lấy một hình trụ nhỏ từ bàn và di chuyển nó sang một cái bàn khác, nhưng để làm như vậy nó phải di chuyển qua một rào cản.
Đối với robot, nếu có càng nhiều khớp chuyển động hơn, việc hướng dẫn cho nó sẽ trở nên phức tạp hơn, trong khi để chỉ dẫn con người, đơn giản chỉ cần phát lệnh bằng lời nói.
Các lập trình viên robot phải cụ thể về chuyển động của từng khớp tại mỗi điểm trên quỹ đạo của nó, đặc biệt là khi các chướng ngại vật chặn “tầm nhìn” của robot đối với mục tiêu của nó.
Thay vì lập trình quỹ đạo từ trước, BLIND chèn một quy trình ở giữa bao gồm con người để tinh chỉnh các tùy chọn được biên soạn - hoặc các dự đoán tốt nhất - do thuật toán của robot đề xuất. BLIND cho phép lấy thông tin từ con người và tính toán quỹ đạo trong không gian tự do ở mức độ cao.
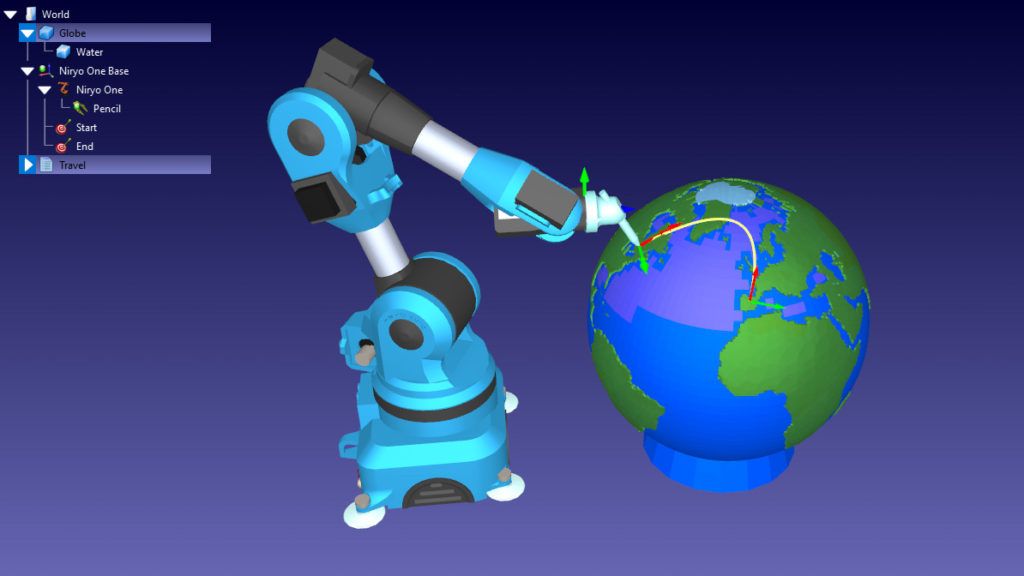
Các nhà nghiên cứu sử dụng một dạng phản hồi nhị phân trong đó con người được gắn nhãn trên các mảnh của quỹ đạo. Các nhãn này xuất hiện dưới dạng các chấm màu xanh lục được kết nối đại diện cho các đường đi có thể có. Khi BLIND bước từ chấm này sang chấm khác, con người chấp thuận hoặc từ chối từng chuyển động để tinh chỉnh đường đi, tránh chướng ngại vật một cách hiệu quả nhất có thể.
Đó là một giao diện dễ sử dụng cho mọi người, bởi vì con người có thể đưa ra lựa chọn: “Tôi thích cái này” hoặc “Tôi không thích cái kia” và robot sử dụng thông tin này để lập kế hoạch. Sau khi thu được một loạt các chuyển động đã được phê duyệt, robot có thể thực hiện nhiệm vụ của nó.
Một trong những điều quan trọng nhất ở đây là sở thích của con người khó có thể diễn tả bằng một công thức toán học. Công việc của các nhà nghiên cứu là đơn giản hóa mối quan hệ giữa người và robot bằng cách kết hợp các sở thích của con người. Chi tiết tham khảo tại:
Rice University. "Humans in the loop help robots find their way: Computer scientists' interactive program aids motion planning for environments with obstacles." ScienceDaily. ScienceDaily, 27 June 2022. <www.sciencedaily.com/releases/2022/06/220627185543.htm>.
(Sưu tầm)
VIỆN IMC
Tòa nhà IMC Tower, Số 176 Trường Chinh, Phường Khương
Thượng, Quận Đống Đa, Thành phố Hà Nội, Việt Nam
Tel/Fax : (+84) 24 3566 6232 / 24 3566 6234
Email: contact@imc.org.vn Website: https://imc.org.vn